Predicting Matchability
W. Hartmann, M. Havlena, K. Schindler Predicting Matchability IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, USA, 2014 (Download supplementary material (ZIP, 9.4 MB))
Abstract
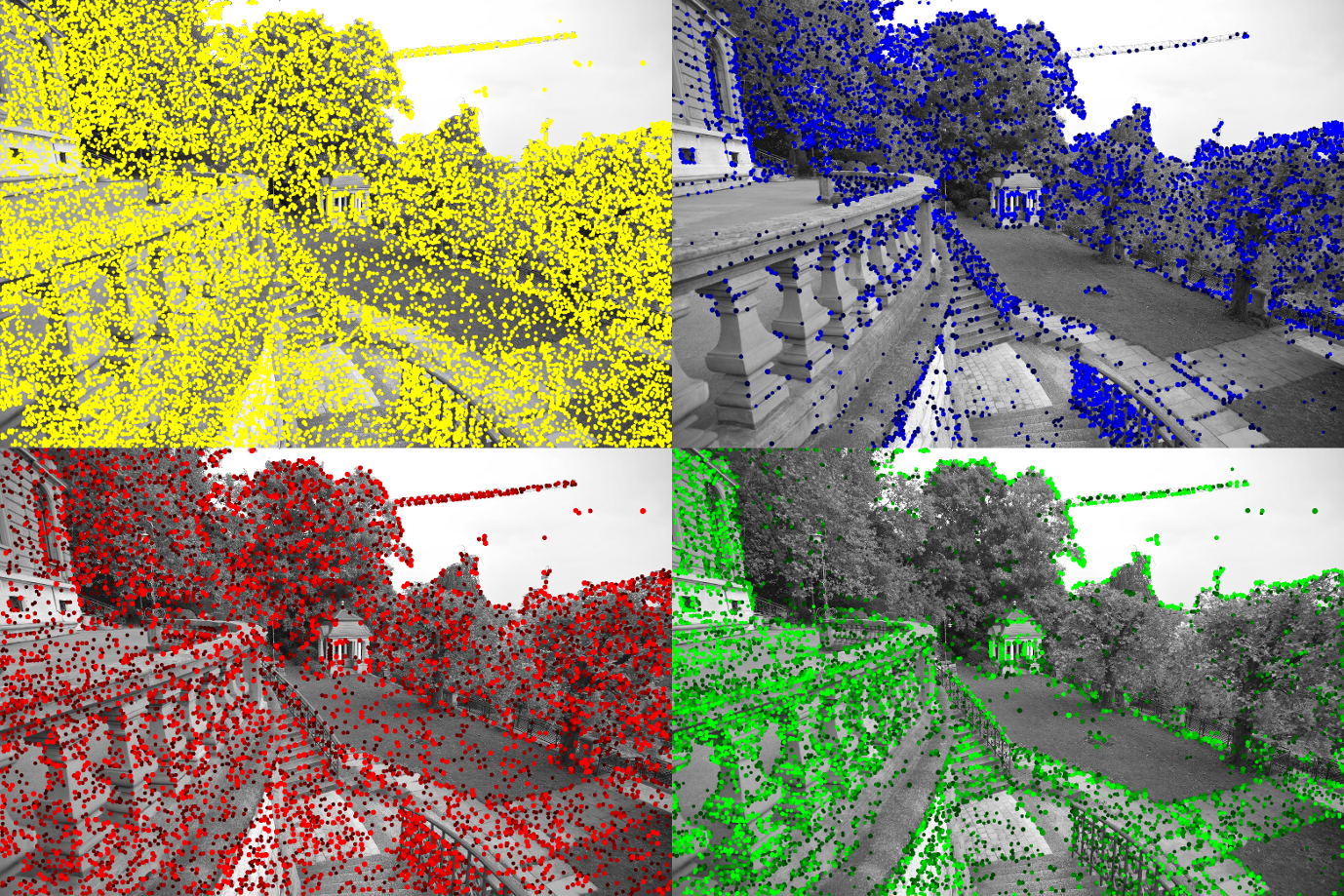
The initial steps of many computer vision algorithms are interest point extraction and matching. In larger image sets the pairwise matching of interest point descriptors between images is an important bottleneck. For each descriptor in one image the (approximate) nearest neighbor in the other one has to be found and checked against the second-nearest neighbor to ensure the correspondence is unambiguous. Here, we asked the question how to best decimate the list of interest points without losing matches, i.e. we aim to speed up matching by filtering out, in advance, those points which would not survive the matching stage. It turns out that the best filtering criterion is not the response of the interest point detector, which in fact is not surprising: the goal of detection are repeatable and welllocalized points, whereas the objective of the selection are points whose descriptors can be matched successfully. We show that one can in fact learn to predict which descriptors are matchable, and thus reduce the number of interest points significantly without losing too many matches. We show that this strategy, as simple as it is, greatly improves the matching success with the same number of points per image. Moreover, we embed the prediction in a state-of-theart Structure-from-Motion pipeline and demonstrate that it also outperforms other selection methods at system level.
Source Code
The source code related to the paper is available here:
Download VLFeat_SIFT.zip (ZIP, 3.5 MB)
Questions related to the code may be directed to .